Design Features:
There are several design features that we consider to be crucial to the success
of our structure. These features are:
-Box-beam arm
-Offset/Extended Platform
-Base
Tensioning Device
-Counterweighted Swing Arm
Box-beam arm

As discussed
before, the box beam arm that spans that gap from the base to the weight
has been designed to be very strong in bending. The reason for this is that
we wanted to reduce the loss in lift height that results from arm deflection.
The final arm design is very stiff under the load of the weight, and is barely
affected by torsion forces due to its orientation to the weight and the platform.
This results in an arm that deflects very little at the end and provides
an ideal anchor point for the lifting mechanism.
Offset/Extended Platform
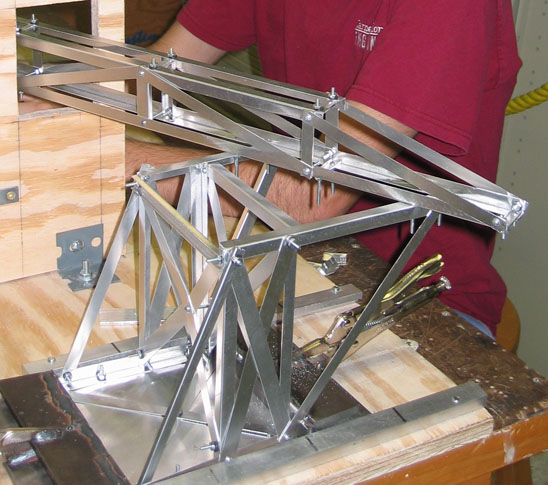
In designing an arm with a direct path to the weight, we required a platform that was offset from the vertical base. This allows the arm to connect to the base diagonally and gives us room to deal with the torsion created by the offset of the arm.
This extended platform bolts directly to the arm that we have created and is supported below by two metal strips. On the leading edge of the platform, we placed a U-channel strip to counteract the compressive forces. On the back edge, we placed a strip in tension to counter the moment created by the arm under load. However, the base still twisted a little under the load, and we placed two pieces of metal to counter the twisting. This results in alternating tension and compression members supporting the base and the platform.
Base Tensioning Device (Quasi-Turnbuckle)

Upon constructing the new base, we found that even accurately cut pieces did not perfectly align. So we integrated a manual tension adjuster into the structure. It operates similar to a turnbuckle except that both screws are threaded in the same direction and it requires a screwdriver to be tightened or loosened. The idea is that tension is applied towards center of tower frame which places the entire frame in compression
Stiffener Strips
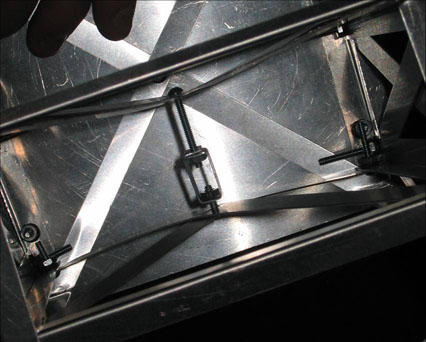
These strips were added to the design after we found that continual clamping and unclamping was weakening our base structure. These strips lie diagonally across the base and significantly improve clamping effectiveness by holding down the edges of the vertical supports.
Counterweighted Swing-Arm
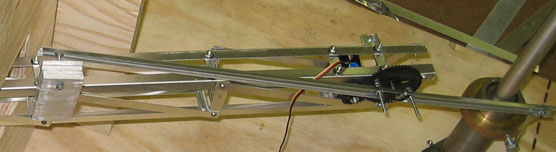
The initial iteration of the lift arm had a gear reduction but was limited in its lifting capabilities by its moment arm. We wanted to increase the lifting height of the structure and to do so we needed a longer swing arm and more torque. To accomplish this, we used a counterweight. Our counterweighted swing arm had to be located entirely on the weight side of the obstacle since the opening would not allow for a full swing. Therefore, we had a limited size for the entire length of the arm. Taking some measurements, we now had counterweights on one side of the arm that could now lift the weight nearly twice as high as our previous lifting mechanism.